|
|

|

|
| e-Pub |
Section: New Results
Random forests for zooplankton classification
Participant : Eric Debreuve.
This work has been made in collaboration with Florent Baronian (Engineering student), Luc Deneire (I3S) and Marc Picheral (LOV)
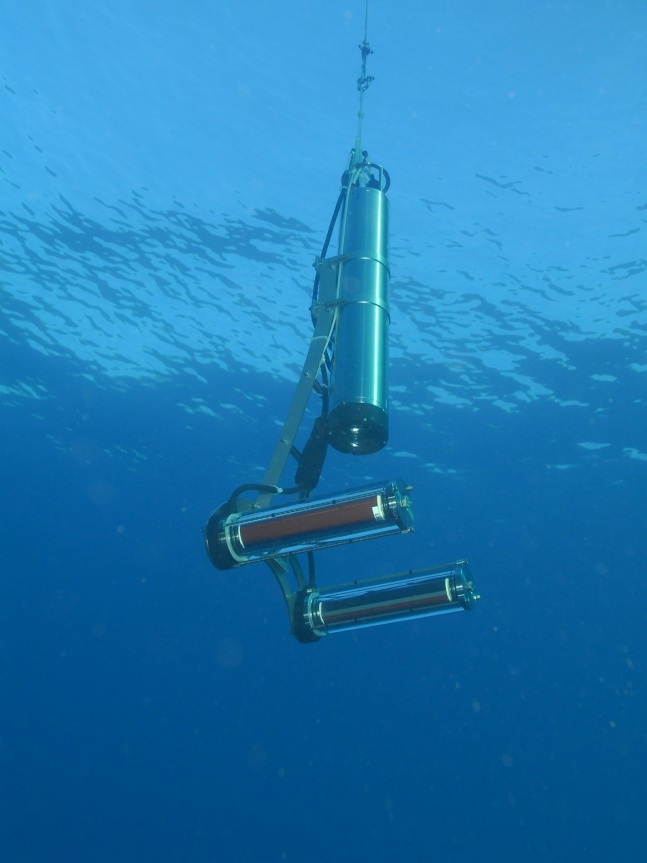
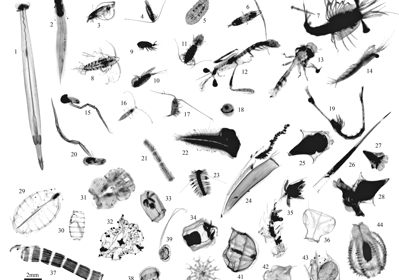
An UVP embedded system (Underwater Vision Profiler) is a device mainly composed of a digital camera with a fixed focal distance, and a flash system designed to illuminate only the focal plane. The device is attached to a boat by a cable and it is let going deep to take pictures at various depths. The purpose of such acquisition campaigns is to analyze the population of zooplankton organisms in different oceanic regions (see Fig. 14 ). The fifth version of the UVP developed at the Laboratoire d'Océanographie de Villefranche (LOV) only stores the pictures. All the processing is done offline: zooplankton organisms are segmented, features are extracted and a classification into types of organisms is performed. With the upcoming sixth version, the goal is to make the device smaller, lighter, and autonomous (for some time) in order to be placed it in appliances designed to drift or navigate autonomously for weeks or months. This imposes to perform all the image processing tasks aboard, which limits the available processing power. Our work is to propose a classification method taking into account the constraints given by the teams in charge of the hardware design. We implemented a Random forest-based classifier which combines both good performances and low computational requirements. Since the images contain a lot of spurious objects called aggregates, we proposed a two-stage approach: the first stage is either a binary classifier or model checker tailored to eliminate the aggregates, while the second stage actually classifies the zooplankton organisms. We tested a combination of a one-class SVM (model checker) and a Random forest, and a combination of two Random forests, the first one being restricted to a binary classifier. Results were encouraging.